Selected Research Topics (This page is not up-to-date - to be updated soon!)
I have been working on a variety of research topics, ranging from stochastic control and information (belief) space planning, to simultaneous localization and mapping for mobile robots, robot vision, cooperative planning, and rescue robotics.
Traditionally, the perception and estimation modules serve the controller by providing an estimate of the system's state. I am interested in methods where the controller serves back the perception and estimation modules by taking the available information in the environment into account. This often can be formulated as a planning problem in the information space. As a result, the controller takes the system's state toward goal while taking maneuvers that steer the sensory information to improve perception, localization, and mapping accuracy, and hence achieve safer robot navigation.
DARPA Subterranean(SubT) Challenge
 |
JPL Team CoSTAR in DARPA Subterranean(SubT) Challenge |
Verifiable and Coordinated Autonomy for Mars Helicopter and Rover Navigation
|
In this project, we consider the problem of planetary exploration with a two-agent team composed of a Mars helicopter and Mars rover, tasked to collect a set of samples from the Mars surface. Due to the high cost and risk associated with such missions, it is critical to have strong correctness and performance guarantees on the robots’ behaviors. To aid this objective, we devise a mission specification framework and formally encode complex mission specifications used for real Mars exploration operations. We introduce Belief Space Temporal Logic (BeST) to capture temporal and uncertainty constraints, ranging from science campaign (e.g., getting samples from certain regions on Mars) to operational constraints such as maintaining certain accuracy over the vehicles’ state and the environment, inter-agent distance, energy level, etc. The notional rover and copter are assumed to have stochastic motion and perception, and are tasked with collecting samples from a partially-known environment. The helicopter provides support in terms of exploring the environment on-demand. We propose a sampling-based control policy synthesis framework for the rover together with an online execution procedure, where exploration demands for the helicopter are generated. Exploration is necessary if insufficient knowledge is available to synthesize a control policy with sufficient success probability. In addition, a health monitor is attached to the execution procedure that triggers re-planning if a mismatch between the maintained environment map and the rover’s sensor observations is detected, e.g., if high-risk areas with sand or high slopes are encountered. |
The Shapeshifter: a Novel Robot to Explore Titan
|
The Shapeshifter is a novel robotic concept for the exploration of Titan or bodies with an atmosphere. The platform is capable of mobility across different domains including flying, rolling on a smooth surface, navigating subsurface voids (ex. caves), floating on a lake and propelling under an ocean. In this video we present a feasibility study, based on a two agents prototype capable of flying and assembling into a cylinder able to roll. Our analysis shows that rolling can be up to two times more energy-efficient than flying. For more info visit NASA and subt.jpl.nasa.gov |
Rover-IRL: Inverse Reinforcement Learning with Soft Value Iteration Networks for Planetary Rover Path Planning
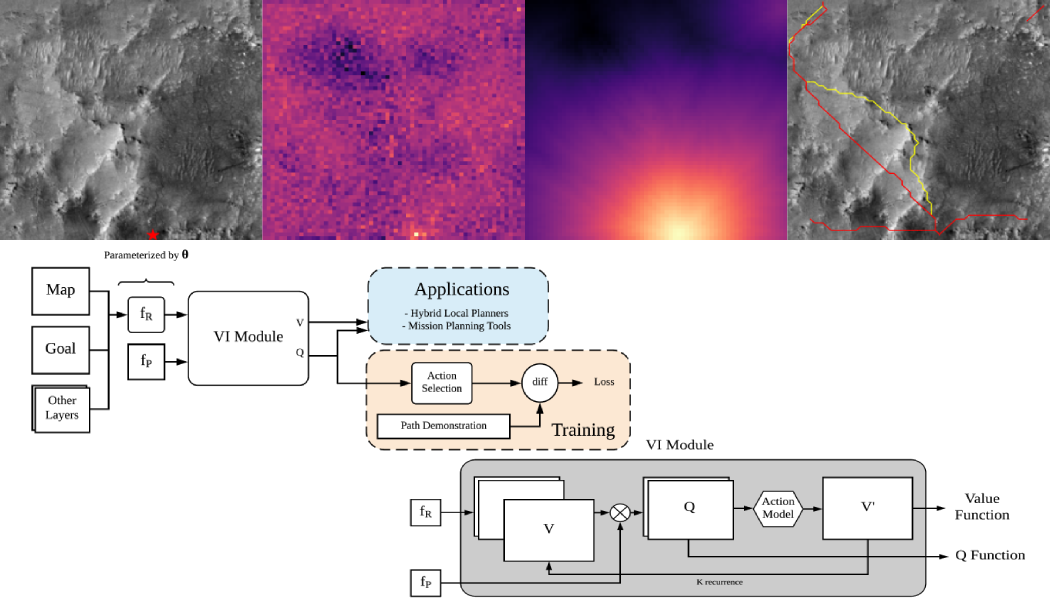 |
Planetary rovers, such as those currently on Mars, face difficult path planning problems, both before landing during the mission planning stages as well as once on the ground. In this work we present a new approach to these planning problems based on inverse reinforcement learning (IRL) using deep convolutional networks and value iteration networks as important internal structures. Value iteration networks are an approximation of the value iteration (VI) algorithm implemented with convolutional neural networks to make VI fully differentiable. We propose a modification to the value iteration recurrence, referred to as the soft value iteration network (SVIN). SVIN is designed to produce more effective training gradients through the value iteration network. It relies on an internal soft policy model, where the policy is represented with a probability distribution over all possible actions, rather than a deterministic policy that returns only the best action. We demonstrate the effectiveness of our proposed architecture in both a grid world dataset as well as a highly realistic synthetic dataset generated from currently deployed rover mission planning tools and real Mars imagery. |
Planning High-Speed Safe Trajectories in Confidence-Rich Maps
 |
Planning safe, high-speed trajectories in unknown environments remains a major roadblock in the way toward achieving fast autonomous flight. Current state-of-the-art planning approaches use sampling-based methods or trajectory optimization to obtain fast trajectories, whose safety is evaluated by taking into account the current state estimate of the environment. In unknown environments, however, this leads to numerous stops caused by the need for re-planning the trajectory due to unexpected obstacles. In this work, we propose to use an active perception paradigm for planning. We predict the future uncertainty of the map and optimize trajectories to minimize re-planning risk. This leads to faster and safer trajectories. We evaluate the proposed planning approach in a series of simulation experiments, which show that we are able to achieve safer trajectories with a smaller number of re-planning stops and faster speeds. |
Quadcopter Autonomy and Planning Under Uncertainty
I was a robotics researcher at Qualcomm research from 2015-2016 where I started and led Qualcomm's research efforts in autonomy and planning under uncertainty. With the advancement of mobile processors’ computational power, development of highly integrated processors for robotics applications has gained attention. Qualcomm Snapdragon Flight, is a highly efficient development platform with a very small form factor designed to help manufacturers build the future of consumer robots and drones. Some of the key components for consumer robots are motion planning, 3D mapping, and 6D tracking (position and orientation). During my time at Qualcomm my team successfully designed and implemented the full navigation stack on Qualcomm Snapdragon flight board. The navigation stack included motion planning under uncertainty, 3D reconstruction module based on data from stereo cameras, and Visual-Inertial Odometry (VIO). The research led to the first fully autonomous flight with all computation on a single board weighing less than 13 grams with size 58x40mm. We showcased the flight at consumer Electronics show in Jan’16.
Autonomous Vision-Only Navigation, Localization, and Mapping
Resource-Constrained Mapping for Collision-Free Autonomous Navigation
|
Long-term operations of resource-constrained robots typically require hard decisions be made about which data to process and/or retain. The question then arises of how to choose which data is most useful to keep to achieve the task at hand. As spatial scale grows, the size of the map will grow without bound, and as temporal scale grows, the number of measurements will grow without bound. In this work, we present the first known approach to tackle both of these issues. The approach has two stages. First, a subset of the variables (focused variables) is selected that are most useful for a particular task. Second, a task-agnostic and principled method (focused inference) is proposed to select a subset of the measurements that maximizes the information over the focused variables. The approach is then applied to the specific task of robot navigation in an obstacle-laden environment. A landmark selection method is proposed to minimize the probability of collision and then select the set of measurements that best localizes those landmarks. It is shown (in simulation and on physical systems) that the two-stage approach outperforms both only selecting measurement and only selecting landmarks in terms of minimizing the probability of collision. |
Multi-robot Planning Under Uncertainty Using Decentralized POMDPs
|
The focus of this work is on solving multi-robot planning problems in continuous spaces with partial observability. Decentralized Partially Observable Markov Decision Processes (Dec-POMDPs) are general models for multi-robot coordination problems, but representing and solving Dec-POMDPs is often intractable for large problems. To allow for a high-level representation that is natural for multi-robot problems and scalable to large discrete and continuous problems, this paper extends the Dec-POMDP model to the Decentralized Partially Observable Semi-Markov Decision Process (Dec-POSMDP). The Dec-POSMDP formulation allows asynchronous decision-making by the robots, which is crucial in multi-robot domains. We also present an algorithm for solving this Dec-POSMDP which is much more scalable than previous methods since it can incorporate closed-loop belief space macro-actions in planning. These macro-actions are automatically constructed to produce robust solutions. The proposed method’s performance is evaluated on a complex multi-robot package delivery problem under uncertainty, showing that our approach can naturally represent multi-robot problems and provide high-quality solutions for large-scale problems. |
Persistent Package Delivery Under Uncertainty Using Quadcopters
 |
Currently there is a desire for the use of quadcopters in persistent missions. Unfortunately, these vehicles commonly face battery and fuel degradation issues. This work centers on development of a planner for long-endurance robotics missions that necessitate health (system’s correct functionality) management in partially observable Markov decision processes (POMDP). Specifically, we focus on the computational problem involving the extended endurance of quadrotors implemented for package delivery. To handle uncertainties in the real world applications (such as wind, measurement noise, etc) we plan in the space of probability distributions over both the vehicle-level and mission-level states. The former consideration includes parameters like vehicle location while the latter involves vehicular health and capabilities. We reduce online planning for mission-level states, performed by forward tree searches in the space of probability distributions, by utilizing the information roadmaps. In doing so, we enable the quadrotors to take preventive measures (such as going to a recharge/repair station) during their missions to preserve their health. We have proposed novel algorithms and a corresponding framework, presenting simulation results for dynamic health and partial observability in a persistent payload delivery mission with limited fuel. |
Window into Belief Space
|
Hardware-in-the-loop experiments are an essential step for transitioning implementation of planning and learning algorithms from simulations to real systems. During execution of algorithms, the planner/learner manipulates numerous latent variables such as probability distributions over state of the system and environment, predicted robot trajectories and transition probabilities. In this work, we describe a new visualization system that consists of multiple projectors and a real-time animation software that is tailored towards presenting the belief space of multi-agent planning and learning algorithms. We have implemented the visualization system in Aerospace Controls Lab's RAVEN indoor flight testbed at MIT. This system utilizes 18 Vicon motion-capture cameras tracking multiple heterogeneous robotic vehicle platforms. State and latent information for the vehicles are published using ROS (Robot Operating System), allowing a computer dedicated to visualization-rendering to package this information in an intuitive format for designers and spectators. The visualization is then projected onto the experiment area, with latent data and physical systems being run synchronously. This allows designers and spectators to observe hardware while simultaneously gaining an intuitive understanding of underlying decisions made by the algorithm. Below are some examples on how this system has been utilized for different projects in our lab.
|
Robust Real-time Replanning in Belief Space in Changing Environments (2013)
|
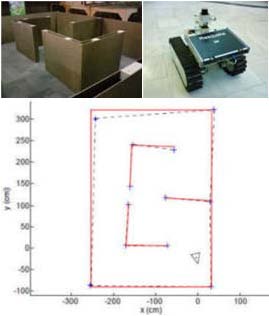
We have devised a principled way of real-time replanning in belief space via realization of the rollout policy based on the FIRM framework. This video demonstrates the performance of the method on physical mobile robots over a long (about 25 minutes) and complex run. In this run, we investigate how such a real-time replanning method can generate a feedback plan that is robust to discrepancies between real models and computational models as well as robust to changes in the environment, failures in the sensory system, and large deviations from the nominal plan. We believe these framework lay the ground work for further advancing the theoretical POMDP framework toward practical applications, and achieving long-term autonomy in robotic systems. |
FIRM (Feedback-based Information RoadMap) -- (2011-2012)
FIRM is a sampling-based framework for motion planning under uncertainty. It takes into account both process (motion) uncertainty and sensing uncertainty. It relies on "stabilizers" that drive the system belief (posterior distribution of the filter) to predefined beliefs (FIRM nodes). This stabilization leads to desirable features such as robustness, reliability, and scalability. In this video the FIRM nodes (Gaussian distributions) are shown by a blue mean and black covariance. The system belief is shown by red mean and covariance. The true system (unknown) is shown in green. The closer the robot is to information sources (black stars) the less sensing uncertainty. Based on the FIRM plan, the robot detours from the shortest path to a more informative path on which the filter and the controller work better and can minimize the collision probability. We have designed different varaints of FIRM for linearly stabilizable systems, [ paper], non-holonomic systems, [ paper], and non-stoppable systems, [ paper ].When the true state (green) is pushed away from its nominal plan, IRM can replan in real-time by putting a new node and locally connecting it to the neighboring nodes, while the rest of graph remains unchanged [ paper ].
Replanning With FIRM
FIRM Plan Execution
Uncertainty Propagation in Nonlinear Dynamical Systems through Fokker-Planck-Kolmogorov PDE (2010)
|
Fokker-Planck-Kolmogorov Equation (FPKE) is a parabolic partial differential equation that lies at the heart of the uncertainty propagation problem and nonlinear filtering because it captures the exact description of evolution of the state probability density function (pdf) through continuous dynamical systems. I worked on solving this equation numerically based on Finite Element Methods (FEM) using dealii package. This video shows the evolution of the system pdf through the 2D stochastic nonlinear Duffing oscillator system. As expected, the pdf converges to its bimodal non-Gaussian stationary distribution. |
Medical Needle Steering Using Information Roadmaps
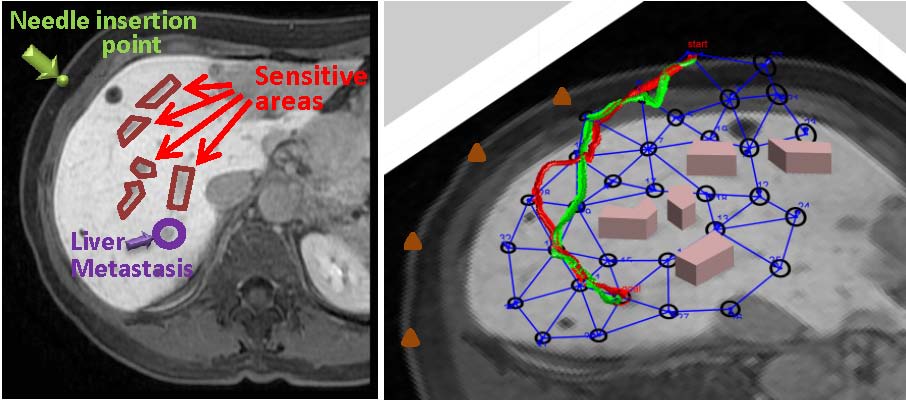 |
Robot-assisted medical procedures, such as medical needle steering, require safe and accurate motions. Information RoadMaps (IRM) seamlessly incorporate the constraints into the control problem and thus the planner can find a feedback that minimizes the probability of collision with sensitive regions in tissue. The left figure shows a Gd-EOB-DTPA–enhanced 3D gradient-echo MRI of a 64-y-old patient with liver metastases due to breast cancer. The right figure shows results of two sample runs using IRM. Due to the feedback nature of the solution, the path is determined at run-time based on the tissue deformation and sensing noise. [ poster] |
Detecting and Coping with reflective surfaces for Service Robot Navigation (2009)
 |
We devised a method for the detection and recognition of a large planar mirror based on the images captured by a monocular camera. We derive a mirror transformation matrix in a homogeneous coordinate and geometric constraints for corresponding real and virtual feature points in the image. We find that existing feature detection methods are not reflection invariant. We introduce a secondary artificial reflection to virtual features to generate secondary features which are proven to share a rigid body motion relationship with the original feature set. Finally, we propose an iterative strategy to adjust the secondary mirror configuration so that existing feature matching methods can be used. The combined method yields a robust mirror detection algorithm which has been verified in physical experiments. [ paper] |
Rescue Robotics (2006-2008)
|
I was a member of Resquake robotics group, at KN Toosi University of Technology, from 2006 to 2008. The core team members were Ehsan Mihankhah, Arash Kalantari, Ehsan Aboosaeidan, Hesam Semsarilar, and Ali Jazayeri, experts in rescue robotics. The team won many prizes in national and international rescue robotics contests. Resquake built different tele-operated and autonomous robots, and my responsibility in this group was designing algorithms for Autonomous Navigation and SLAM in rescue environments, for the autonomous robot. |
LV-SLAM: SLAM by fusing Monocular camera and 2D range finder (2007-2008)
 |
In this work we proposed a method for augmenting the information of a monocular camera and a range finder. The proposed method is a valuable step towards solving the SLAM problem in unstructured environments free from problems of using encoders’ data. It lets the robot to benefit from a feature-based map for filtering purposes, while it exploits an accurate motion model, based on point-wise raw range scan matching rather than unreliable feature-based range scan matching, in unstructured environments. Moreover, robust loop closure detection procedure is the other consequence of this method. Experiments with a low-cost IEEE 1394 webcam and a range finder illustrate the effectiveness of the proposed method in drift-free SLAM at loop closing motions in unstructured environments. |
Feature-based Range Scan Matching and LRF-based EKF-SLAM (2006-2007)
 |
Presented method in this work aims to develop an accurate motion model and SLAM algorithm, which is only based on the Laser Range Finder (LRF) data. Proposed method tries to overcome some practical problems in traditional motion models and SLAM approaches, such as robot slippage, and inaccuracy in parameters related to robot’s hardware. Novel insights specific to process and measurement model, and making use of them in the IEKF framework, give rise to the real time method with drift-free performance in restricted environments. Furthermore, uncertainty measures, calculated through the method, are valuable information for fusion purposes and also an accurate motion model, derived in this method, can be used as a robust and an accurate localization procedure in different structured environments. These issues are validated through experimental implementations; experiments verify method’s efficiency both in pure localization and in SLAM scenarios in the restricted environments, involving loop closures. |